Acquisition of Spatial Knowledge
Symbolic approaches to spatial knowledge representationand inference are discussed and applied to construct expert systems in the previous section. Logic (fuzzy and nonfuzzy), production systems, semantic networks, frames, object oriented programming, and their hybrids all belong to symbolic systems in which knowledge is modeled by symbols. Intelligence is realized by a symbolic structure in which symbols can be manipulated and reasoning can be made. The advantages of the symbolic approaches are that they provide a structured representation of knowledge so that processing elements corresponding to meaningful concepts and inference can be traced and explained. The approach is thus a top-down approach which gives consensus knowledge to a system by instructing it what to feel and respond without having to gain knowledge through experience. It corresponds to our learning of spatial knowledge from a domain specific expert.
The symbolic approaches are however insufficient or inappropriate to construct intelligent spatial decision support system (SDSS). Symbolic systems are usually intolerant to faults and inefficient in automatic knowledge acquisition and learning via sensation and experience. Intelligence is not attained through evolution, like human race, of these systems. Modeled after the human brain, the neural network approach, on the other hand, provides a mechanism for knowledge acquisition. A neural network is a massively parallel structure in which a large number of processing units (called neurons), each performing simple computational tasks, are connected together to represent and acquire knowledge, and to make inference. Geographical information is distributed to the neurons, and knowledge is encoded by connection strengths and acquired through a learning process. It is, more or less, a bottom up approach and is regarded by some as an efficient model for recognition, content addressable memory, and associative reasoning. Differing from the symbolic systems, neural network models appear to have stronger learning capability and higher tolerance to faults. Their dynamic behaviors and reasoning processes are, however, difficult to explain. Attainment of intelligence generally takes a longer time and tends to fail in complex situations.
Parallel to neural networks, evolutionary computation which imitates biological evolution can also be used for automatic spatial knowledge acquisition through learning by examples via a parallel multipoint optimal search mechanism. We can, for example, learn rules by evolutionary computational models.
One may wonder why we need neural networks or evolutionary paradigms for geographical analysis. The answer to the question is mainly twofold. First, as discussed above, the neural network or evolutionary paradigm provides an alternative framework for spatial knowledge representation and inference. Problems such as spatial feature extraction and pattern recognition which cannot be appropriately modeled by the symbolic approaches may be effectively captured by these distributive models. Second, they may serve as a means to acquire spatial knowledge (which may be in symbolic form) through automatic learning.
Taking information, structured and unstructured knowledge as a whole in geographical analysis, their coordination should take on the format depicted in Figure 1. Sitting on top of the hierarchy is the deep knowledge which captures complicated spatial relationships that are, at the present moment, not easy to be automatically acquired through experience or learned by examples as advocated by neural networks, evolutionary computations, and other machine learning models. This is the type of domain specific knowledge which can be effectively instilled by experts as symbolic or highly structured knowledge. Knowledge in the second level down the hierarchy is of lower level of intelligence. It is responsible for tasks which do not require deep thinking but fast extraction or recognition of spatial features or images. It belongs to the perceptual and cognitive functions of our audio and visual faculties which efficiently detect structures and motions from data. It provides fundamental information for our in depth thought processes. Such level of intelligence can be rather effectively imitated by neural or evolutionary computations.
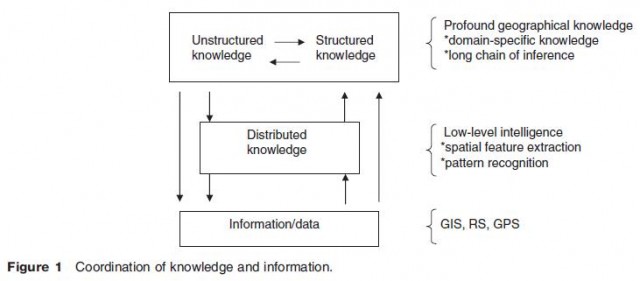
Apparently, the bottom up process is similar to our unsupervised learning process which acquires knowledge from information and examples. The top-down process, on the other hand, is our learning process which uses accumulated knowledge to orient our faculties to look for useful things contained in information or our everyday experience so that new knowledge can be formed.
To recapitulate, humans often reason with intuitions, values, experiences, and judgements. We tend to organize our knowledge with loosely defined concepts and structures. Reasoning may not require highly structured mathematical models but loosely structured commonsense that has been extensively studied in artificial intelligence. Nevertheless, we generally need both to solve complicated problems.
- Expert Systems for Domain-Specific Problems
- Spatial Knowledge Representation and Inference
- Artificial Intelligence and Expert Systems
- Invisible Data Mappers: Artists Who Use Cartographic Metaphors to Visualize Informational Territories Such as the Stock Market, the Internet, or the Human Genome
- Agents and Actors: Artists Who Make Maps or Engage in Situated, Locational Activities in Order to Challenge the Status Quo or Change the World
- Symbol Saboteurs: Artists Who Use the Visual Iconography of the Map to Reference Personal, Fictional, Utopian, or Metaphorical Places
- Art and Cartography
- ‘Nature’, the Economy, and Changing Research Initiatives
- Science and State Colonialisms